Vertical Integration: Move Fast and Don't Break (safety critical) Things Part 2
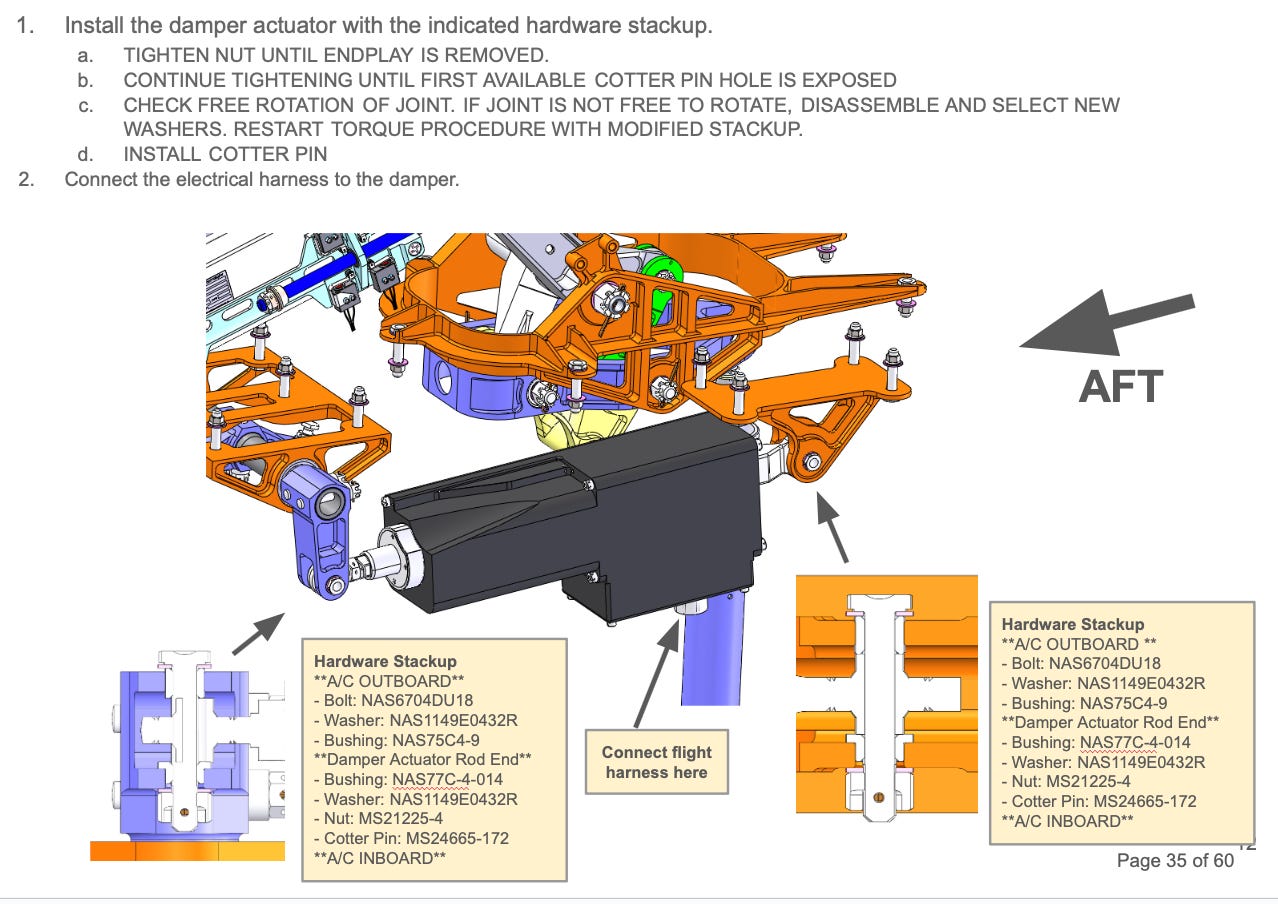
Vertical integration is the key strategy for reducing iteration cycle time

Part 2 in a series about how Boom develops amazing hardware quickly and efficiently (See Part 1)
Every hardware company has two clocks running at once: the calendar, and the Slacker Index. The calendar is obvious—it’s how long your project takes. But the Slacker Index is more insidious: it measures how much time your engineers spend not engineering and building, because they’re waiting. Waiting for parts. Waiting for suppliers. Waiting for test windows. A high Slacker Index means brilliant people are stuck in analysis and meetings, terrified of mistakes because the cost of rework is measured in months. A low Slacker Index means fast iteration, risk-taking, and breakthroughs.
The formal definition is simple: Slacker Index = total lead time ÷ actual working time. If it takes 10 hours to machine a part but 10 months to receive it, your Slacker Index is off the charts. Put another way: twelve months to get a part that takes twelve hours to make.
The most powerful way to crush your Slacker Index is vertical integration—owning the tools, supply chains, and test infrastructure yourself. It doesn’t just shave months off a schedule. It changes the physics of what’s possible. Problems that would be existential with a year-long lead time become solvable with a 24-hour iteration cycle.
To show you what this looks like in practice, here are two stories from Boom: one painful, one liberating.
Story 1: XB-1 and the Damned Damper Actuator

XB-1 was originally equipped with two-axis digital stability augmentation. The primary flight control system was manual, with cables and push-rods sending pilot input to hydraulically powered actuators that actually moved the flight control surface. But on the pitch and yaw axes, we also had digital stability augmentation: in series with pilot input was a small actuator that would give the pilot a digital assist to make the airplane easier to fly. This put XB-1 right where it should be—with the reliability and simplicity of a mechanical system but with an opportunity for the team to start learning digital flight controls, without needing to do a full fly-by-wire development.
After XB-1 flight 1, we decided to put stability augmentation on the roll axis as well. The airplane had flown exactly as predicted, but in turbulent weather with a real pilot in the cockpit, the subjective pilot feel wasn’t great. We wanted to do better.
We already had a few spare actuators in inventory and had planned for this contingency in the airplane design, so this shouldn’t have been a huge project. It ended up taking just three months—probably about the fastest anyone has ever built and flown a human-rated digital stability augmentation system. Yet, for reasons I’ll explain, we should have been able to do it in about half that time.
The actuators we were using were semi-custom units from a traditional aerospace BigCo. Each one was physically small, but cost $60,000 apiece. Worse than the exorbitant cost was their fragility and their lead time: the vendor quoted a 52-week (one year!) lead for additional units.
During development testing, it was easy to break them. We fried one actuator after sending it an errant command. Another failed due to a race condition on power-up. Suddenly we were down to just one spare.
If that last spare broke, XB-1 would be grounded for a year. At $60k per actuator, the parts were expensive—but the XB-1 program itself burned about $60k per day in salaries, facilities, and overhead. A one-year delay would have bankrupted the company. So the last actuator was treated like fine china. “Why is it taking us two weeks to review a test plan?” I asked the team in frustration. Their answer: “Because if we get this wrong, we kill the company.” They were right.
The team ultimately succeeded—we never broke the last actuator, and we finished the race to supersonic flight. But damper-gate cost us six weeks—far more expensive than building “zillions” of spares in the first place.
The lesson: lead time is evil. A 52-week delay didn’t just threaten one component—it cascaded through the program, forcing everyone to slow down and overanalyze.
Story 2: Symphony and the 3D-Printed Turbine Blade
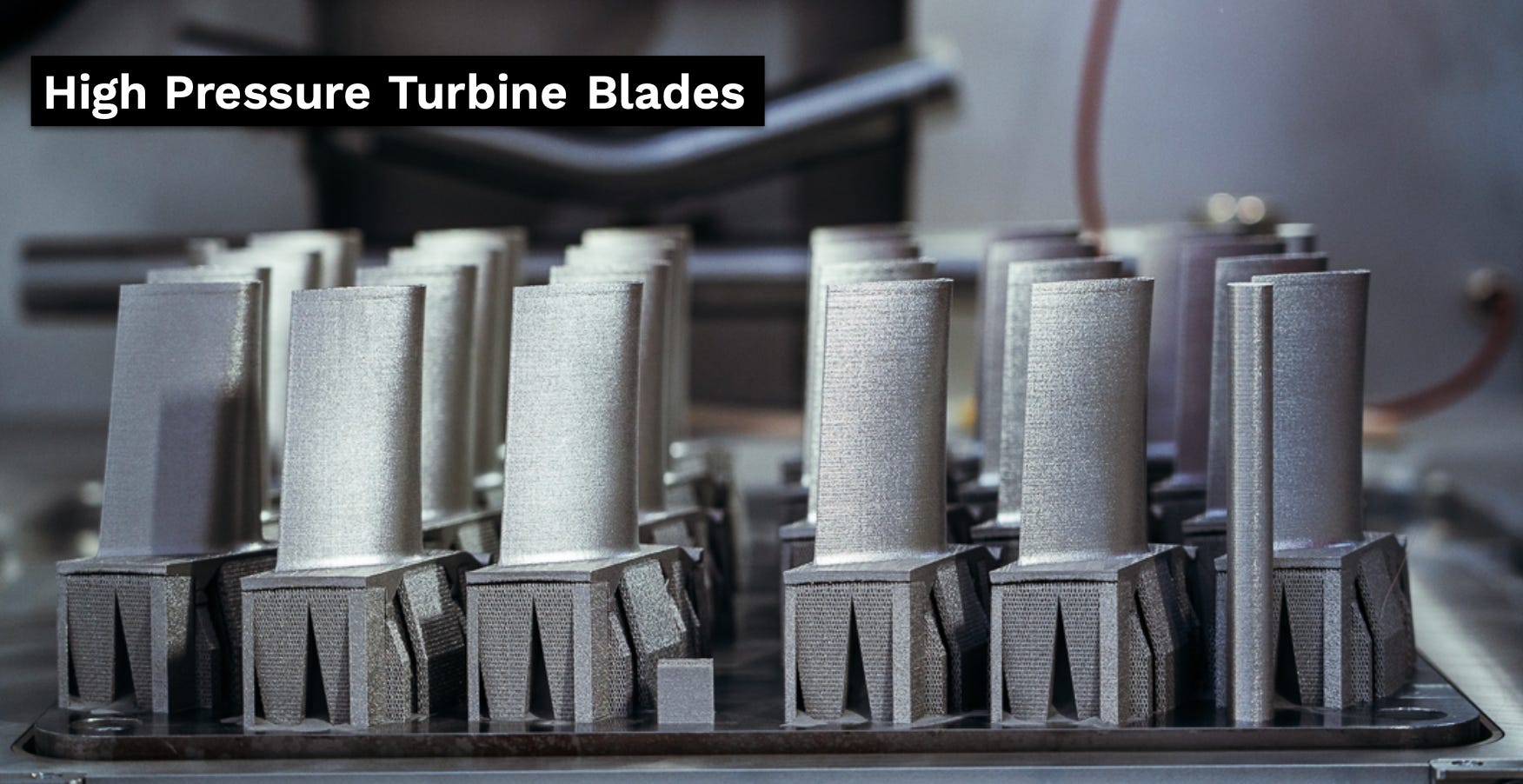
When we started building the first Symphony engine prototype, we initially quoted parts out of the traditional aerospace supply chain. One of the critical parts was the high-pressure turbine (HPT) airfoils. For the first engine, the plan was to 3D-print them from nickel superalloy, avoiding the time and expense of hard tooling.
The best quote we could find: $1M for a single engine’s worth of blades. Pricey, but survivable. The real gut punch: lead time of six months. For hundreds of thousands more, the vendor said they might be able to shave off a month or two.
So I asked: how long does it actually take to print one blade? About 24 hours. How much is a 3D printer? Around $2M. How long to get one? I braced for the answer to be “years.” Instead: “Actually, they’re in inventory—we can get one in a couple weeks.”
So for the cost of two sets of blades, we could own the machine outright—and produce parts in 24 hours instead of six months. We ordered the machine immediately. Today, we’re already several design iterations deep—further ahead than the traditional supply chain would have gotten us by delivering the first box of blades.
Slow supply chains force slow engineering. If we had stayed with the vendor, our designers would have been paralyzed. A mistake would mean waiting half a year to try again. But with a printer on the floor, the team can iterate daily. They can take risks, test fast, fail fast, and learn.
Vertical integration collapsed our iteration cycle from months to days—and with it, engineering costs dropped too. Hardware development started to look more like agile software development.
Optimizing Slacker Index is Key to Enabling Iterative Development
The Slacker Index is the ratio between total waiting time and building time. It exposes how broken traditional hardware development cycles really are.
Slacker index matters because it shows where the biggest opportunities are to reduce delay. During development, iteration is everything—and reducing the time required for a single iteration allows more iterations to be done faster—reducing the time, cost, and risk of development.
Vertical integration—owning your supply chain, tools, and test capabilities—is the most powerful way to crush your Slacker Index. It doesn’t just save calendar time. It changes the physics of what’s possible. Fast iteration turns scary problems into solvable ones.
Lead time isn’t just inconvenient. It’s existential.
Stay tuned for Part 3 in this series, where I’ll share our radical roadmap for how a tiny team is developing the first custom civil supersonic rapidly.
The Slacker index is severe in silicon chips. Getting a non-trivial chip from idea to product in 2 years is considered epic fast, with 3 or even 4 years being normal. This produces a moat and inertia effect where even if you can see a better design for something like LLM inference today, you may abandon the effort before even starting on the grounds that you have no idea if the chip will be useful 3 years from now.
Yet, hardware is generally much less complex than software. A complex hardware algorithm may be expressed in a few thousand lines of Verilog, with a C++ equivalent being hundreds. This compares to software projects routinely hundreds of thousands of lines or even millions, a scale which may take a small team a year. Hardware ideas, in principle, should be implemented in just months, not years.
Imagine what a Boom attitude could do for silicon chips.
This is a lesson BYB appears to have taken to heart